【ポケット・クエリーズ × 鴻池組】切羽観察をロボットで革新!トンネル掘削の「危険作業ゼロ」へ挑戦
2025年07月08日23時40分 / 提供:PR TIMES![]()
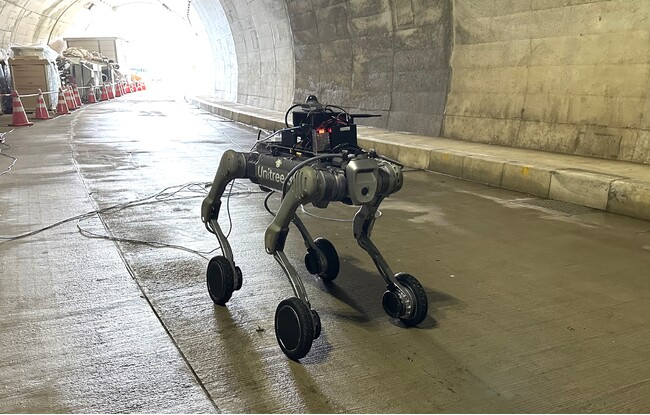
四足歩行ロボットによる自動化で、現場の安全確保と技能継承の両立を図る
株式会社ポケット・クエリーズ(本社:東京都新宿区 代表:佐々木宣彦、以下当社)は、株式会社鴻池組(本社:大阪市中央区 代表:渡津 弘己)との共同プロジェクトとして、トンネル工事において崩落リスクの高い切羽(掘削最前線)に四足歩行ロボットを先行して投入し、従来は熟練作業員が担っていた現地観察業務を代替する自立型ロボットシステムの開発に着手しました。
本取り組みは、ライントレース機能による自律走行制御を活用し、危険性の高いトンネル掘削現場において、人間の代わりに四足歩行ロボットが状況観察を実施することを目的としています。
[ 続きを読む ]